基于OpenCV的机器人分拣系统设计
发布时间:2024-04-04 作者: 新闻中心
随着各大电商的加快速度进行发展,我国快递行业的整体规模迅速壮大,包裹数量逐年增多,快递的错派、丢件等问题也日渐凸显,传统人工分拣已经没办法适应当前的分拣需求,亟需一种用于自动检验、工件加工和装配自动化以及生产的全部过程的控制和监视的图像识别机器,按任务需要从原始图像数据中提取有关
目前,针对机器人分拣系统的方案研究成为众多学者关注的热点。韦志文[1]基于机器视觉设计了一种轻量化的分拣机器人,搭建了实验平台并完成了小型铸件的分拣。李殷[2]基于深度学习提出了工业机器人物品识别分拣系统模块设计,在建模解析分类之后工业机器人对物品进行实践分拣操作。马泽明等人[3]将视觉技术、搬运机器人和无线控制网相结合,设计了一种智能搬运机器人的实验平台。王连庆等人[4]构建了一套针对无序来料的定位系统,引导机械手对无序物料进行精确抓取和有序摆放。
本文设计的工业机器人分拣系统与工业相机的快速拍照功能相结合,可实现包裹读码后的快速分拣及信息记录交互等功能,大量减少了分拣过程中的人工需求,提高了分拣效率及自动化程度,并大幅度提升了分拣准确率。
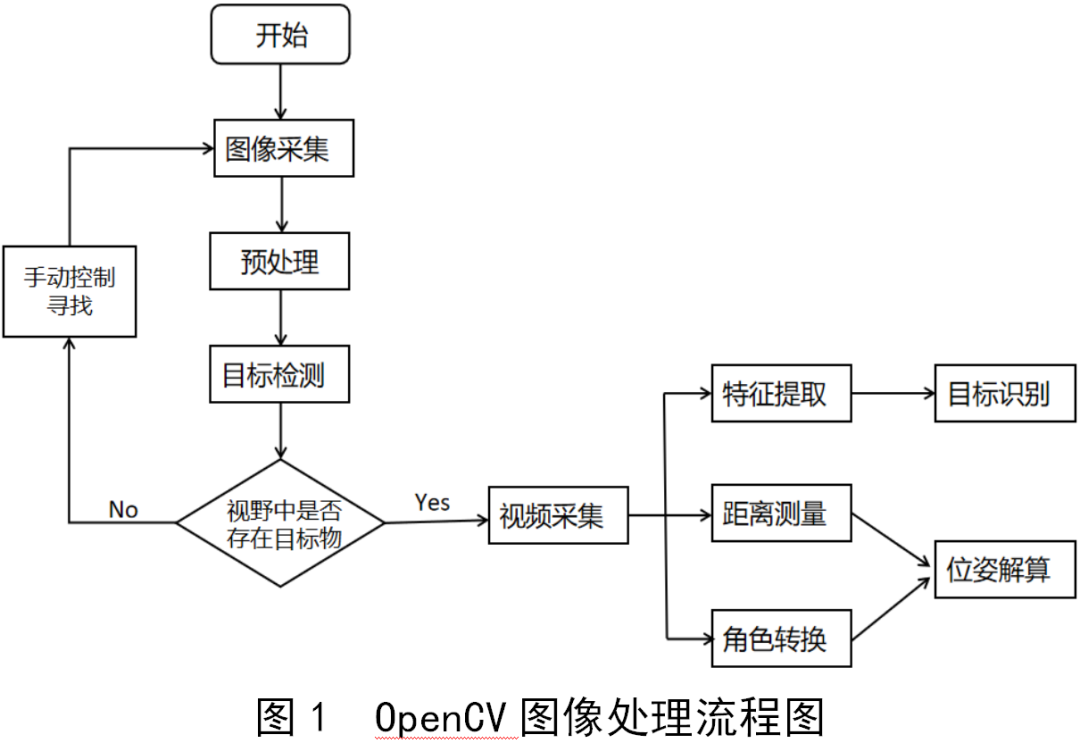
图像处理技术是用计算机对图像信息做处理的技术,通过图像处理能提取图像中的有用信息并精简数据量,是决定分拣过程能否达到精准且高效的关键。本设计采用OpenCV[5]对原始图像进行预处理,提取图像特征,进行图像识别。本项目通过扫描物流包裹上的数字,对包裹进行识别,构建坐标系对机械臂完成协同控制,实现在复杂环境下的包裹分拣,提高了分拣过程中机械臂末端执行器的效能,物流快递包裹可进行相对有效分拣,达到快速分拣的目的,提高了工业生产效率,降低了工作成本。OpenCV图像处理流程图如图1所示。
传统的条形码虽然识别简单,但要学习多种编码方式。识别条形码下方数字单号可以直接把数据录入计算机进行数据处理,得到快递信息。
OCR文字识别是指对图像文件做多元化的分析识别处理,获取文字及版面信息的过程。首先,对快递信息进行图像读取及图像预处理,再用OpenCV内置的图像检测算子进行仔细的检测,最后传入tesseract-OCR进行识别。这种方法不仅速度快,而且抗外部干扰能力也比较好,可以准确识别快递的相关数字信息。OCR的技术路线 图像预处理
图像预处理是在图片识别之前对图片进行前期处理,抑制图片中的无关信息,增强
图像灰度化是将一张彩色图像向灰色图像转化的过程。相比于彩色图像,灰色图像更容易处理,可以消除颜色干扰。原图像如图3所示,灰度图像如图4所示。cv2.cvtColor()函数是颜色空间转换函数,能轻松实现图像的灰度化,代码如下:
图像掩膜是用选定的图形对需要处理的图像(局部或全部)进行遮挡,来处理图像特定区域的处理过程。提取感兴趣区,用预先制作的感兴趣区掩膜与待处理图像相乘,得到感兴趣区图像,感兴趣区内图像值保持不变,而区外图像值都为0。掩膜图像如图5所示。
黑帽运算就是取出图片中亮度低的地方,即突出更黑暗的区域。黑帽操作图像如图6所示。morphologyEx()是形态学操作函数,可以方便地对图像进行黑帽操作,代码如下:
图像边缘检测可以大幅度减少数据量,并剔除可以认为不相关的信息,保留图像重要的结构属性。基于查找的方法,通过寻找图像一阶导数中的最大和最小值来检测边界,通常是将边界定位在梯度最大的方向。Canny算子边缘检测函数的目标是找到一个最优的边缘检测
()函数用于查找检测物体的轮廓,cv2.drawContours()函数用于在图像上绘制轮廓。代码如下:
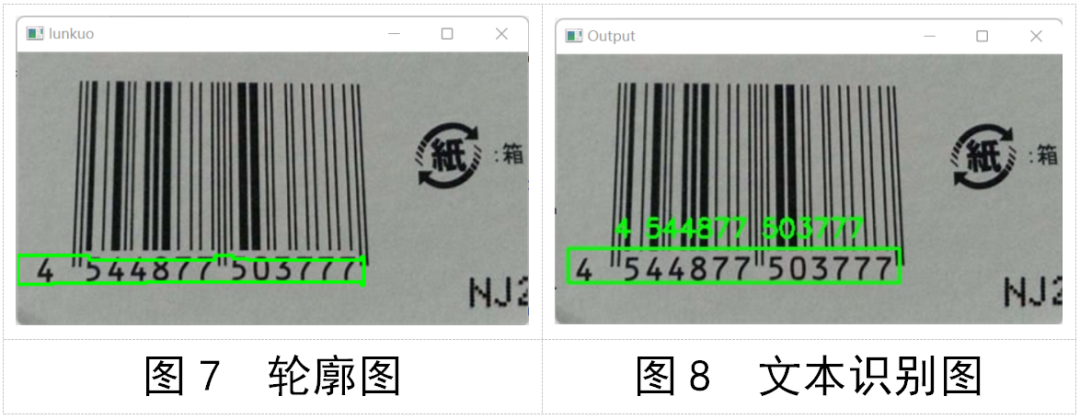
文本识别采用tesseract-OCR识别技术,tesseract-OCR是由Tesseract Google开发并维护的OCR开源库,有着极高的精确度和灵活性,它能够最终靠训练识别出任何字体,也可以识别出数字和字符。识别出的轮廓图如图7所示,文本识别图如图8所示。
本文对小型工业机械臂进行了运动学分析,并使用计算机建模软件(UG)对工业机器人及其运动空间进行了建模。该工业机器人分拣系统[6]采用
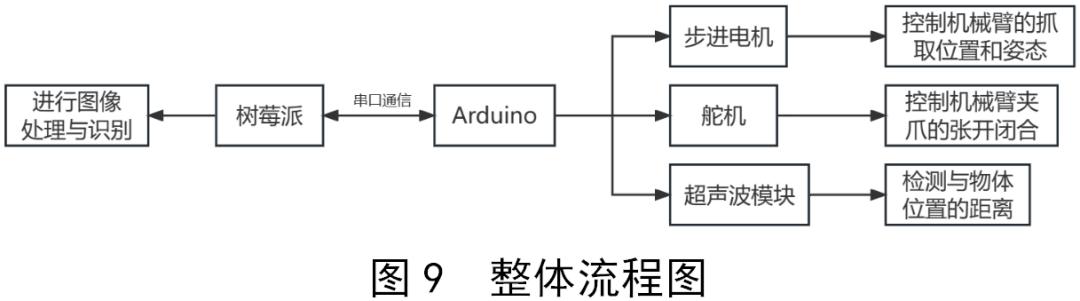
以串口连接进行通信,树莓派用于对图像做处理与识别;Arduino开发板用于控制步进电机、舵机和超声波红外测距模块。其中舵机用于控制机器人的转向,也用于控制机械夹爪的张合;超声波红外测距模块用于检测与物体的距离。整体流程图如图9所示。2.2 机械结构
机械臂各部件通过UG建模,采用3D打印技术打印。在结构设计时使用平面轴承、滚动轴承、线性轴承等一系列标准件,具有增加精度、减少摩擦力等作用。机械臂底座采用铝板与机械臂连接,某些特定的程度上减少了机械臂前倾现象。机械臂Z轴的上下移动采用丝杆传动,传动轴向力大、可自锁、定位精度高。使用同步带传动,避免步进电机在低转速下产生振动及噪声。机械臂整体装配图如图10所示。
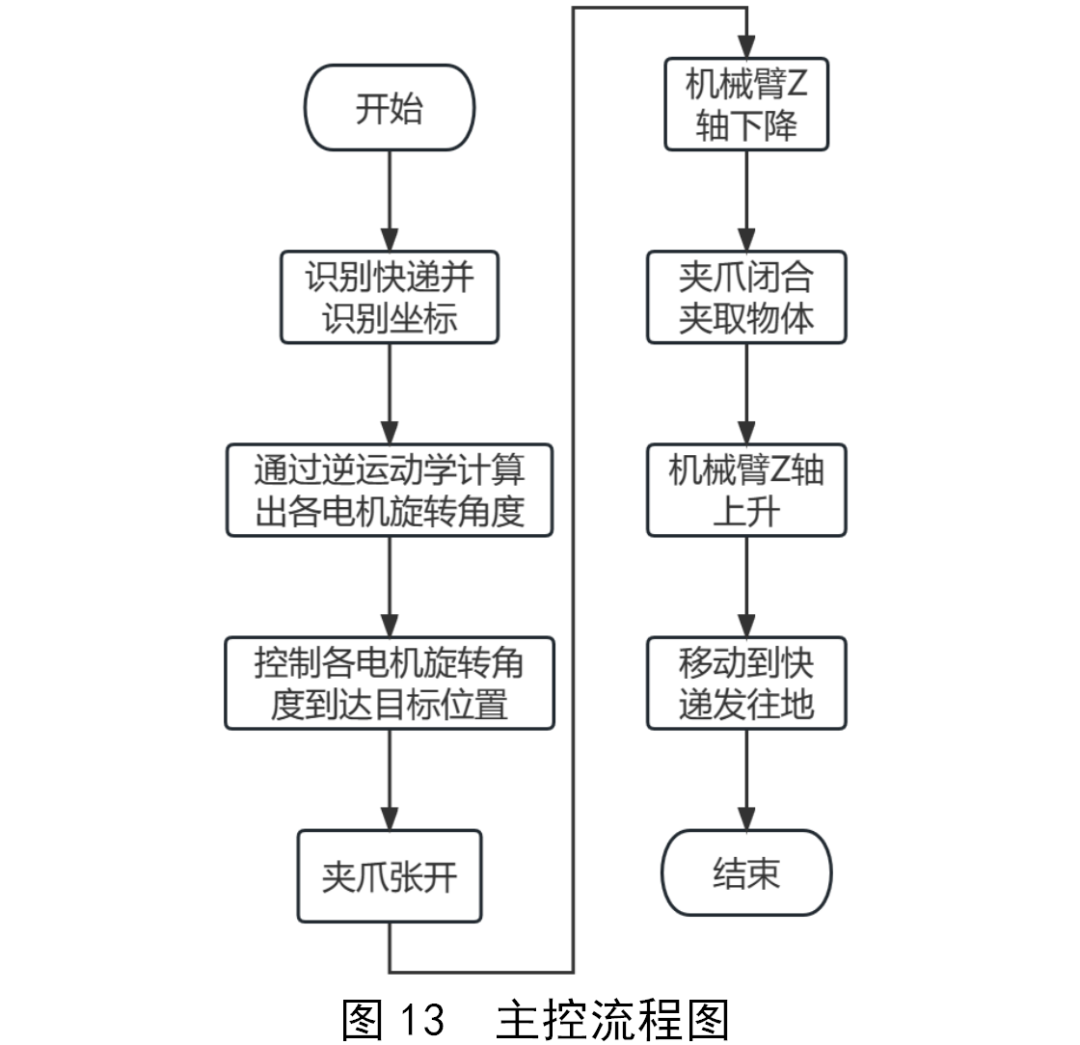
首先,通过OpenCV图像处理技术识别快递单上的数字串和快递的坐标,判断快递运往方向;再由树莓派通过串口发送信息给Arduino Uno开发板,Arduino Uno开发板逆运动求解出各电机旋转角度;然后,控制各电机旋转角度到达目标位置,打开夹爪,当机械臂的Z轴下降到合适位置时,闭合夹爪,夹取快递;当夹取动作完成后,机械臂的Z轴上升,移动到快递发往地,将物品放到相应位置。主控流程图如图13所示。
本文设计了一种基于OpenCV的机器人分拣系统,运用OpenCV对快递信息进行图像读取及图像预处理,再用OpenCV内置的图像检测算子进行仔细的检测,最后传入tesseract-OCR进行识别,协同控制机械臂,实现在复杂环境下的包裹分拣。该设计大量减少了分拣过程中的人工需求,提高了分拣效率及自动化程度,并大幅度提高了分拣准确率。同时,将视觉技术应用到工业分拣中,提高了公司运营效率,降低了公司制作成本,能够促进工厂和企业的升级,因而具备比较好的应用前景。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉
,四轴,智能车,在这里给大家推荐一本书,书名叫做《BeagleBone
设计所需要的基本资源都说的很清楚,还举了很多典型的应用例子,比如比如用
通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、
ROHM BM6337x/BM6357x系列怎么样才能解决开发背景中出现的很多问题呢?
华为拟分红770亿元!中移动全球首发5G-A商用部署/英特尔晶圆代工亏损 科技新闻点评
数字信号处理实验操作教程:3-3 mp3音频编码实验(AD7606采集)